
技术文章
Technical articles 更新时间:2026-06-01
更新时间:2026-06-01 点击次数:211
点击次数:211
无缆磁驱动执行器因其可远程操控、结构小型化和环境适应性强等特点,在微创诊疗中展现出广阔前景,可服务于靶向药物输送、远程介入操作和体内检测等应用。然而,在该领域中,如何在保证控制方式简洁可靠的同时赋予执行器多样化功能,仍是一项亟待突破的关键问题。面对复杂且高度非结构化的生物环境,微型机器人需要根据任务需求在不同运动模式与操作形态之间灵活切换。现有磁驱机器人通常存在性能取舍问题:刚性磁性执行器能够在简单磁场作用下实现较稳定、可预测的运动,并具有较好的结构强度,但其固定构型限制了多模态操作能力;软体磁性执行器虽可通过连续变形获得复杂形态变化,机械承载能力却随之下降,高自由度特性也大幅提升了建模与控制难度。
围绕上述矛盾,清华大学深圳国际研究生院先进制造领域生物制造工程实验室弥胜利教授团队提出了一种新的铰接式模块化设计思路,该研究以“Articulated Untethered Magnetic Actuators for Multimodal and Cross-Scale Operations"为题,发表在国际期刊《Cyborg and Bionic Systems》上。该方法以离散刚性模块为基本单元,并通过旋转关节进行连接,使系统在保持刚性结构可预测性和机械鲁棒性的同时,获得类似软体机器人的可重构能力。通过引入有限且可设计的自由度,执行器能够实现更丰富的姿态调节和任务相关形变,从而为多功能磁驱机器人设计提供了新的解决方案。

该设计的另一项重要特点是,其运动产生与模式切换均可在单一均匀磁场下完成。换言之,系统不依赖复杂空间梯度磁场即可实现多种操作行为,从而降低了磁场生成与控制系统的复杂度,也提升了平台在实际应用场景中的可实现性(图1)。

图1. 铰接式磁性执行器的模块化构型与磁场驱动机制。
在该设计框架基础上,研究团队利用摩方精密面投影微立体光刻(PμSL)技术(microArch® S230,精度:2μm )制备了四类代表性铰接式磁驱执行器(图2),包括磁性螳螂(MM)、磁性鹈鹕(MP)、磁性镊子(MT)和磁性夹子(MC)。
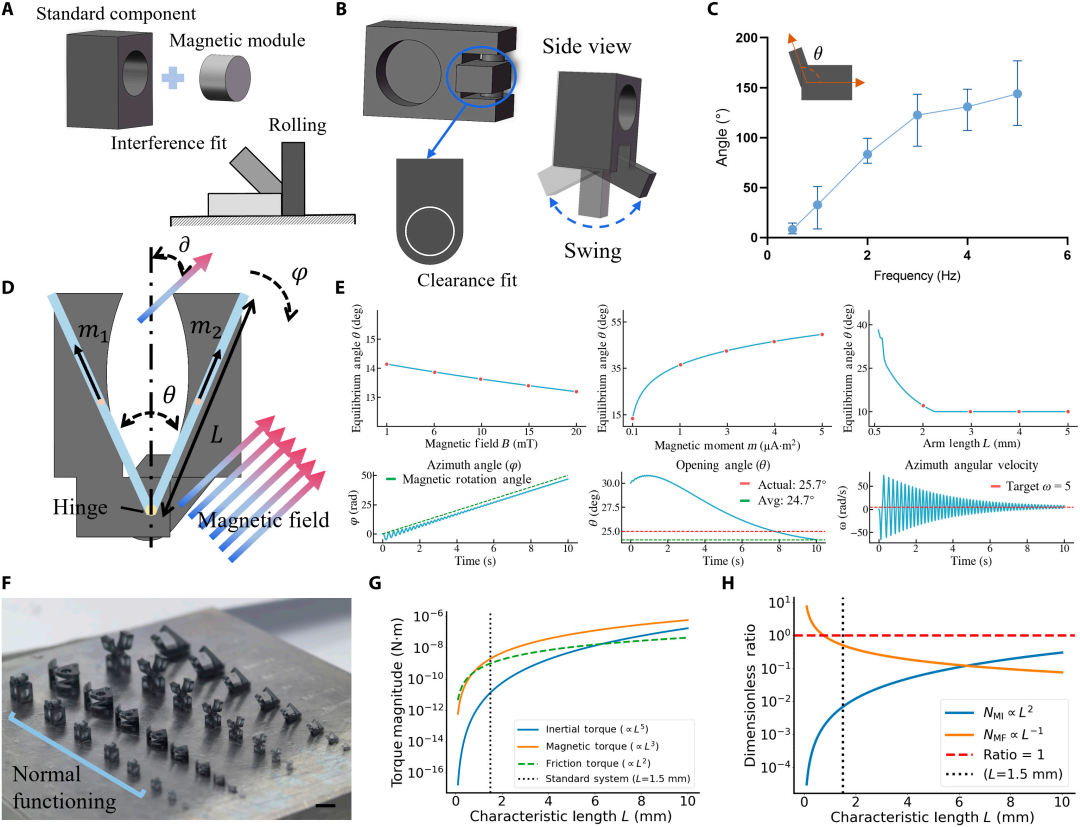
图2. 铰接式运动机制的分析与建模。
在多模态与跨尺度操作验证中(图3),这些执行器能够实现爬行、滚动等不同运动方式,并可根据任务需求切换模式,完成货物运输、液体搅拌与目标释放等功能。为评估该机制的可靠性与可推广性,研究团队建立了相应的数学模型并开展仿真分析,同时借助无量纲分析验证该设计从毫米级到亚毫米级尺度应用的可行性。
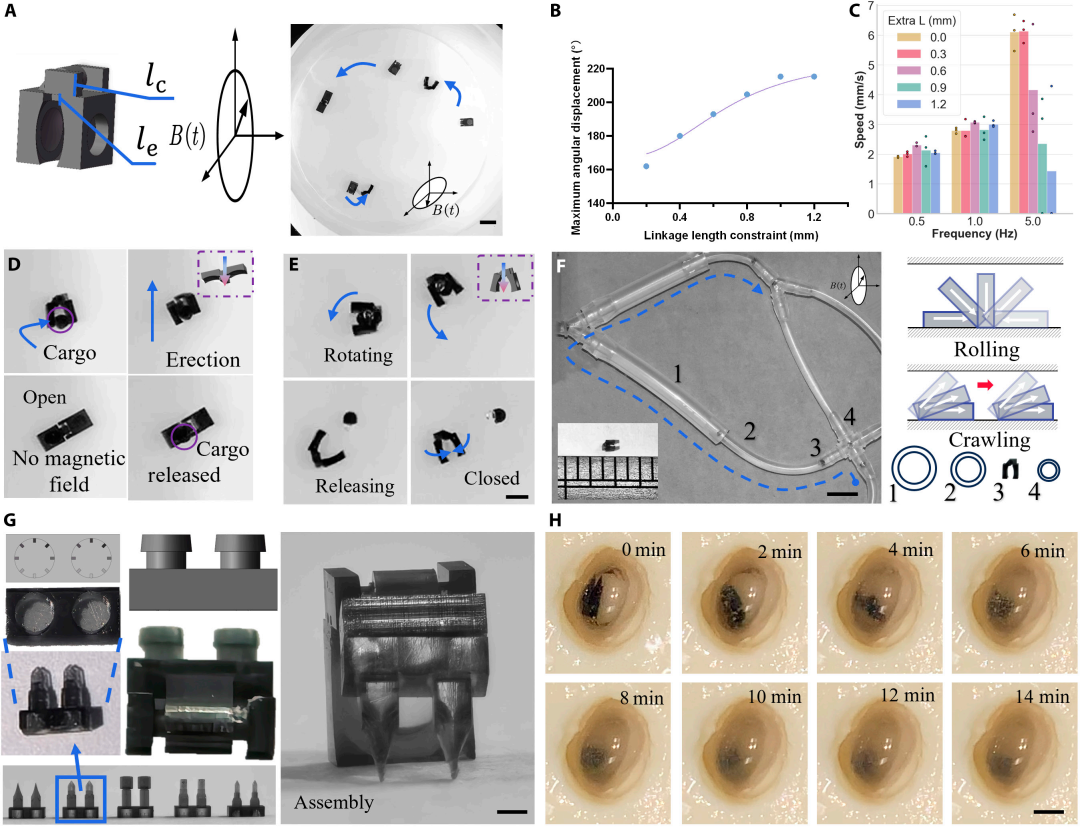
图3. 磁驱微镊的跨尺度功能验证与模块化装配展示。
实验结果表明,该系列机器人具有良好的任务适应能力,可在不同场景中独立完成相应功能操作。面向复杂生物环境,该平台在验证过程中表现出较高的灵活性与操作精度(图4):一方面,微型机器人能够在微尺度、高弯曲度的血管模型中实现灵活导航;另一方面,在宏观尺度的离体猪胃模型中,机器人能够克服真实生理结构带来的障碍,并将目标货物准确递送至指定位置。

图4. 磁驱螳螂与磁驱鹈鹕的结构设计及功能演示。
此外,研究还展示了该平台的多阶段逻辑控制能力。以磁性夹子(MC)为例,研究团队通过预设内部磁化分布,使执行器在同一均匀外磁场作用下即可依次完成多个操作阶段,并根据特定状态实现类似逻辑判定的功能响应(图5)。
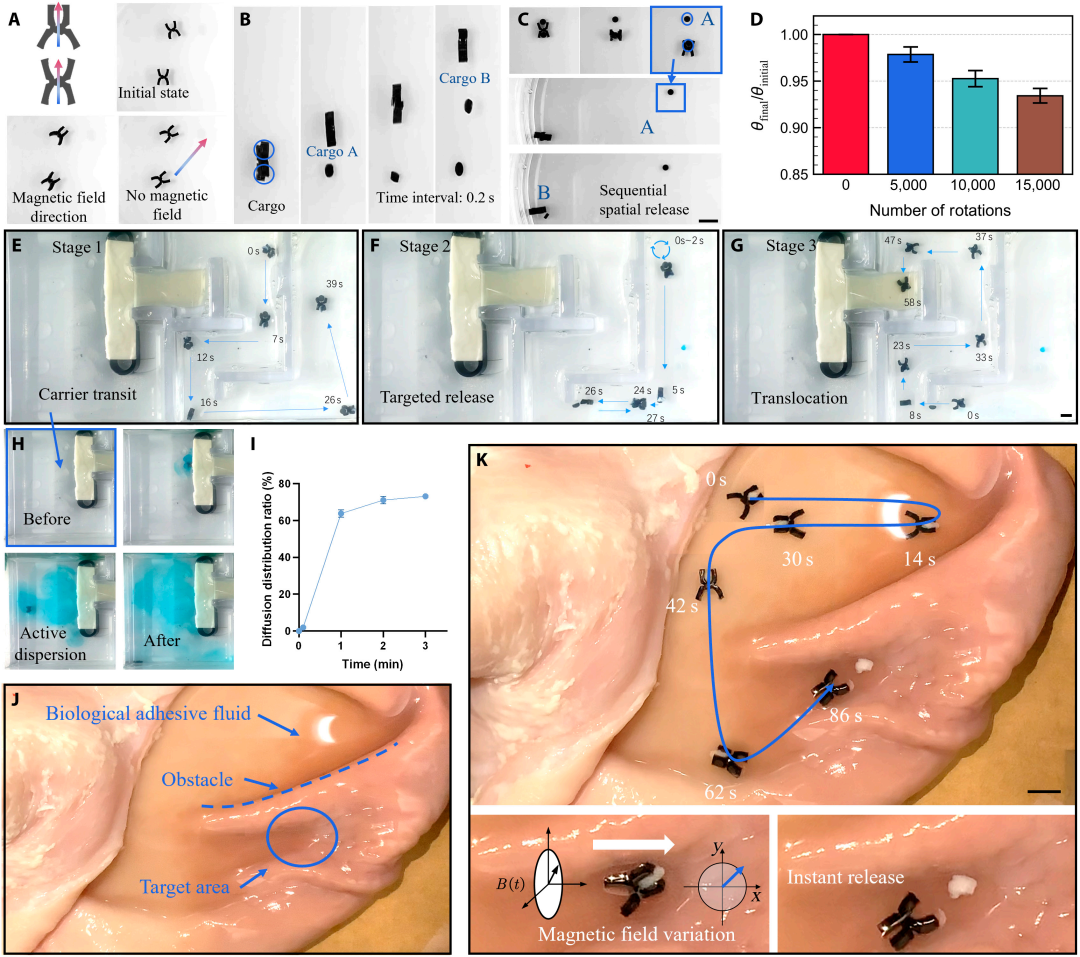
图5. 磁性执行器在复杂迷宫模型与离体猪胃环境中的靶向递送验证。
总结:该研究构建了一套兼具易控性、可扩展性与多功能性的磁性机器人设计框架,为面向复杂生物环境的高精度医疗操作提供了新的技术基础。

 当前位置:
当前位置:
